解决方案 交通流量调查解决方案
系统概述
针对视频设备环境适应性差。北京智宸天驰提出了激光式交通情况调查解决方案,流量统计不准确等不足。本方案采用先进的激光扫描技术,具有全天候工作稳定可靠性,在检测精度以及抗干扰方面具有优异的性能,能精确获取车辆的三维轮廓。突破了一系列核心技术壁垒,具有极为广阔的应用前景,将激光检测技术成功的引入到智能交通领域,引领了交通流量调查领域的技术发展方向,该技术还可以拓展到航运、轨道、智能工厂、智能汽车以及智能机器人等领域。
系统特色
应用激光扫描技术和三维轮廓车型识别技术,性能明显优于同类非接交调设备;
能够实现如下检测功能:机动车分型、交通量、地点车速、车头时距、跟车百分比、车头间距、时间占有率等交通参数;
采用性能优良的ARM9工业级处理器与嵌入式实时操作系统,系统稳定可靠;
不依靠外界光源,不受外界光线影响,夜间检测效果良好;
采用I类安全激光,对人眼无任何伤害;
具备自动加热功能,在雾、雨、雪条件下性能稳定;
支持TC P/IP网络传输、无线传输,用户可灵活选择;
支持大容量SD卡,可用于海量数据存储,数据可保存10年;
支持电话线、ADSL、光纤、局域网等多种联网方式;
具备故障自动检测以及实时上报功能;
支持太阳能供电;
施工以及调试简单,维护以及产品升级方便。
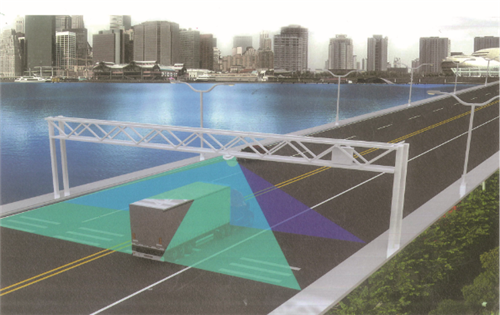
工作原理
双激光高速扫描传感器以特定角度安装在立杆上、在车辆行驶断面上形成前后两束光幕,当正常行驶的汽车闯入第一束激光幕时,并计算其触发时间、车辆高度以及宽度信息,激光传感器会迅速通过信号线缆传向中央数据采集控制器,光幕之间的距离能够精确测定。通过前后间隔两束光幕,包括长、宽、高以及一些局部特征.精确重构车辆三维轮廓,当汽车完全通过检测区域以后,还能进一步计算出车辆的速度以及长度,系统会根据原始信息,从而进行精确车型识别、数据存储、打包以及上传。
技术指标
三维轮廓检测精度:长度:≤±30CM宽度:≤±10CM高度:≤±10CM;
流量统计误差:≤±2%;
综合车型识别误差:≤±10%(I类标准);
速度检测范围:0~180km/h;
速度检测误差:≤±2%;
数据存储时间:≥10年;
系统总功耗:≤30W;
结构稳定性:最大抗风能力40m/s;
工作电源:AC220V±15%,50Hz±4Hz;DC9~36V;
相对湿度:≤98%;
工作温度:-55℃~+70℃;
平均无故障时间:≥20000小时;
传感器防护等级:IP67。

联系电话:021-89721473 18511891500
(工作日:09:30-18:30)
客服邮箱:23895706@qq.com
地址:北京市海淀区西小口路66号中关村东升科技园·北领地D-3楼408室
 京公网安备11010802033933号
京公网安备11010802033933号